模拟训练仿真系统
系统首先由流程监控计算机的流程监控软件根据流程的需要发送相关指令(调平、起竖、回平、撤收)等,经光纤路由器后到达主控仿真单元;
主控仿真单元根据流程操作计算机的指令进行相应的功能控制模拟,依据实装的控制逻辑和信号控制类型,发送相关的CAN控制指令给控制仿真单元(控制仿真单元1、控制仿真单元2、步进电机控制仿真单元);
控制仿真单元根据实装控制逻辑输出相应的物理量电信号(包括电磁阀控制信号、电机控制信号、行程开关采集、角度信号采集、压力传感器信号采集等)给FS平台动作信号模拟器或实物负载;
FS平台动作信号模拟器在收到控制信号或驱动信号后,根据平台的仿真模型进行平台动作模拟,并通过开关量、模拟量、数字量信号反馈给相应的控制仿真单元,由其通过CAN总线反馈给主控仿真单元进行逻辑判断,根据相应的状态执行相应的流程动作控制;
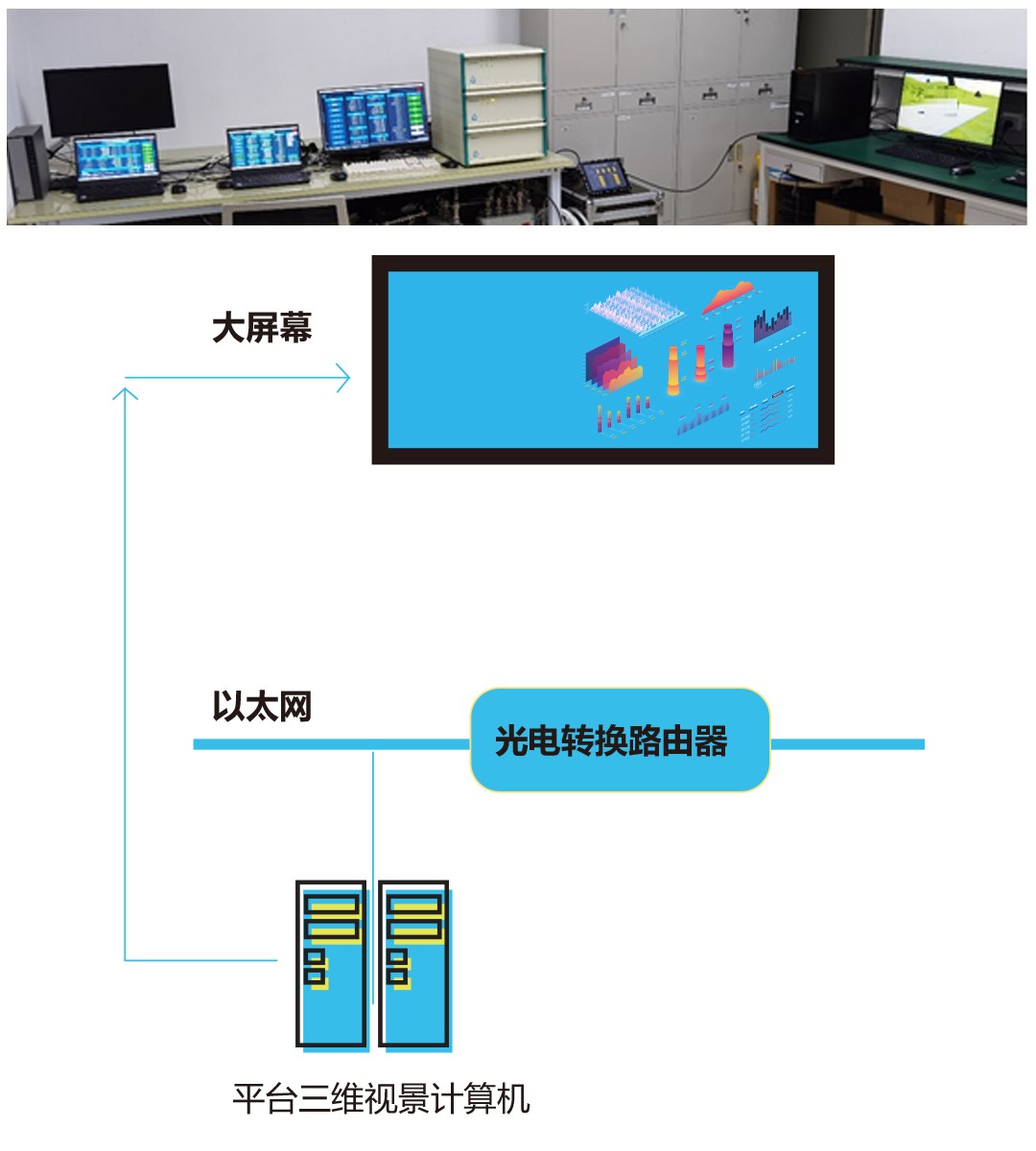
系统反馈的状态数据通过以太网发送给流程监控计算机、视景显示系统,设备根据状态数据驱动平台视景模型进行状态显示,提供操作人员直观的动作显示。